一、中型机器人介绍
1、本套件采用框架式结构来拼装机器人小车底盘,具备装配方便外形多变等特点,无竞赛基础也能很快掌握机器人小车底盘的装配,而对于专业从事机电产品创新的人员,又能自由发挥,装配出各种特色功能的底盘。
2、套件框架材料采用4mm厚度的铝方管,连接件采用实心铝材高精数铣加工而成,从而使底盘具备坚固耐用的特点,重复拆装基本不影响本身零配件应具备的精度。
3、套件配备多种运动零配件,包括麦克纳姆轮、全向轮、大脚轮、履带等,从而能装配出适应不同场合的机器人小车。
4、底盘动力源采用带编码器的空心杯直流减速电机,配合相应的电机驱动板及控制算法,可实现快速、高精度的运动控制。
5、底盘驱动配备大功率直流电机驱动板,并具备对电机的过流、堵转等异常情况的监测,保证了电机的正常动力输出。
6、主控系统采用M4为核心的主控芯片,高达168MHZ的主频,结合C语言程序,可灵活控制机器人小车完成各种任务,并将主控芯片所有引脚引出,方便扩展功能的实现。
7、选配各类传感器、电机、驱动板、机械零配件等,满足不同功能需求。
8、提供机械、电子硬件、程序等相关资料,方便各机械电子类专业的教学、科研、竞赛的需求。
二、中型机器人套件模型介绍
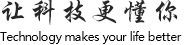
1、模型一
采用麦克纳姆轮为运动机构的机器人小车底盘,该底盘的特点为:通过对四个轮子转速的简单控制可实现小车前进、后退、左前、左后、右前、右后、逆时针旋转、顺时针旋转、左平移、右平移;而通过对四个轮子转速的精密控制,则可实现任意方向,任意旋转角度的复杂动作。
适用于国内ROBOMASTERS、ROBOCON等对机器人运动控制要求较高的比赛,方便实现机器人运动方向及角度的精确控制。
2、模型二

本例采用大脚轮胎为运动机构的机器人小车底盘,该底盘的特点为:借助大脚轮胎较宽的尺寸,使得底盘具备良好的抓地力及避震特性,能适应各类复杂、起伏路面。采用该种轮胎能一定程度上简化底盘的避震设计。
小车底盘适用于国内ROBOMASTERS、ROBOTAC以及自动寻线类机器人比赛的需求。
3、模型三

采用履带为运动机构的机器人小车底盘,该底盘的特点为:借助履带超强的通过性,使得底盘具备良好的通过性,能良好的通过壕沟、坑洞、大角度坡道等各类复杂地形。由于本例只需要两个电机作为动力源,在一定程序上降低了硬件成本,也降低了程序的控制难度。
小车底盘适用于各类对场地通行有特殊需求的机器人比赛。
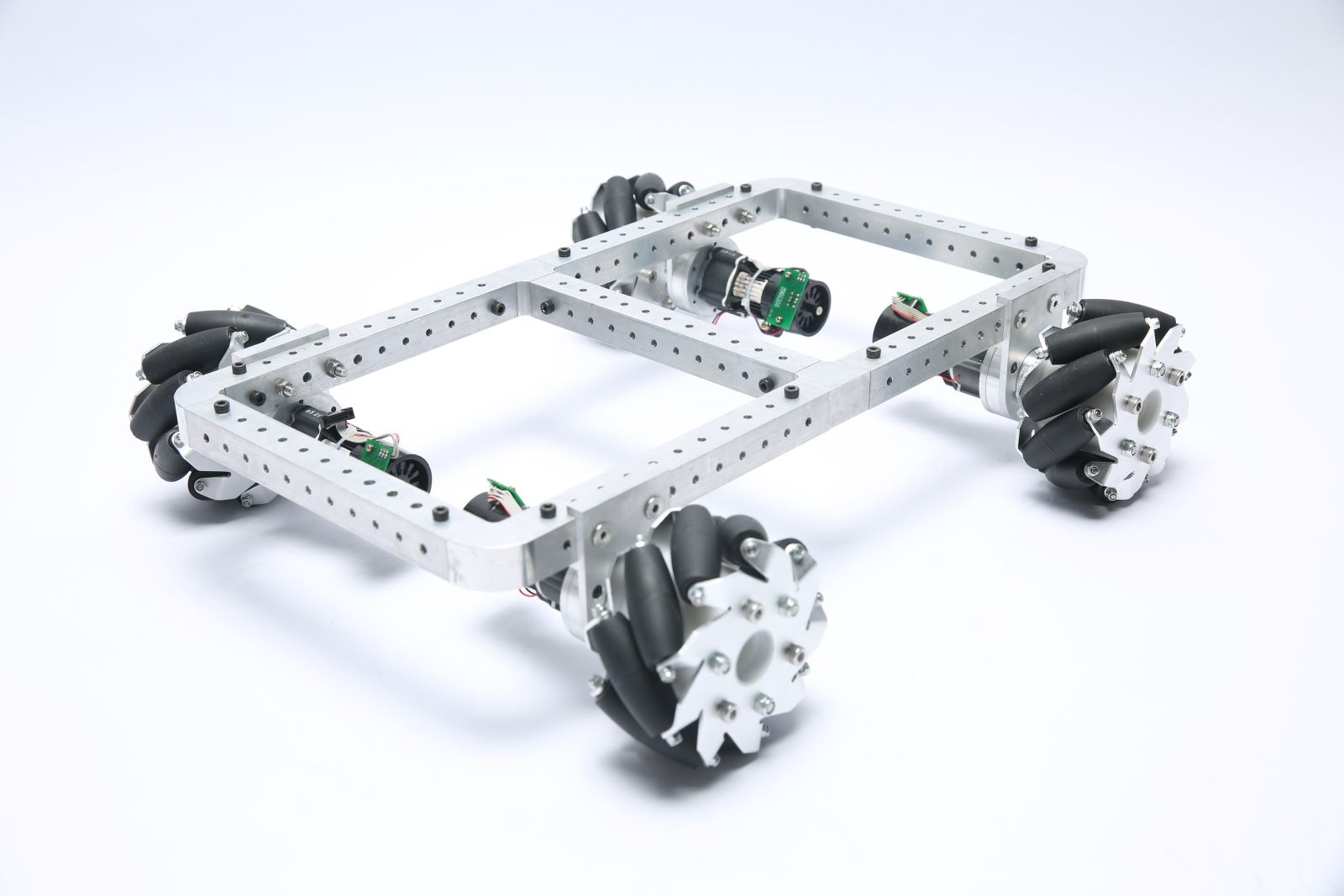
4、模型四
采用全向轮为运动机构的机器人小车底盘,该底盘的特点为:通过对三个轮子转速的简单控制可实现小车三个角度的前进、后退控制;而通过对三个轮子转速的精密控制,则可实现任意方向,任意旋转角度的复杂动作。本例相较于麦克纳姆轮因为只采用了三个电机、三个轮子因此在成本上有一定优势。
适用于国内ROBOMASTERS、ROBOCON等对机器人运动控制要求较高的比赛,方便实现机器人运动方向及角度的精确控制。


